
원점 복귀
위치 결정을 하는 시스템에서 시스템의 절대적인 위치에 대해 결정을 하는 경우, 먼저 원점을 결정해야 합니다.
MC 기능 모듈에서는 기계 원점을 결정하는 방법으로 모션 제어 명령의 「MC_Home(원점 복귀)」 명령 또는 MC_HomeWithParameter(파라미터 지정 원점 복귀) 명령을 사용합니다.
모터를 실제로 운전하여 리미트 센서, 원점근방 센서, 원점입력신호를 이용하여 기계
원점을 결정합니다. 그 원점입력 신호로 근접센서나 엔코더 Z상 등을 사용합니다.

Axis(축)에서 지정된 축에 대해 Execute(기동)가 기동하면 원점 복귀 동작을 시작합니다.
원점 복귀 명령에서 사용되는 각종 파라미터는 축 파라미터로 설정합니다.
원점 복귀 명령에는 10종류의 원점 복귀 동작 모드가 있습니다.(시운전 참고)
∙ 근방 퇴피 원점 근방 입력 OFF 지정
∙ 근방 퇴피 원점 근방 입력 ON 지정
∙ 원점 근방 입력 OFF 지정
∙ 원점 근방 입력 ON 지정
∙ 한계 입력 OFF 지정
∙ 근방 퇴피 원점 입력 마스크 거리 지정
∙ 한계 입력만
∙ 근방 퇴피 유지 시간 지정
∙ 원점 근방 입력 없음. 유지 원점 입력 지정
∙ 원점 사전 설정

절대값 엔코더 원점설정
여기에서는 G5 시리즈 서보 드라이버 EtherCAT 통신 내장 타입의 절대값 엔코더를 사용하는 경우에 대해 설명합니.
절대값 엔코더는 CPU 유니트의 전원이 끊어져도 엔코더 내 배터리 백업에 의해 절대값 데이터를 유지합니다.
따라서 MC_Power(운전 가능) 명령을 실행할 때 절대값 엔코더로 현재 위치를 판독해서 위치를 확정하고 있습니다.
한번 원점을 확정해 놓으면 인크리멘탈 엔코더와 같이 원점 복귀 조작은 필요 없습니다.
∙ 절대값 엔코더를 사용하는 경우에는 CPU 유니트의 배터리와
서보 드라이버의 절대값 엔코더 백업용 배터리를 모두 접속해 주십시오.
∙ 절대값 엔코더를 처음 사용할 때나 모터를 교환 또는 절대값 엔코더의 배터리 소모등으로
절대값 데이터를 잃은 경우에는 반드시 「MC_Home(원점 복귀)」 명령 또는
「MC_HomeWithParameter(파라미터 지정 원점 복귀)」 명령을 실행하고 원점을 확정해 주십시오.
이 경우 원점 확정 후에 서보 드라이버측의 전원 재투입이 필요합니다.
그 이후는 MC_Power(운전 가능)만으로 위치를 확정합니다.
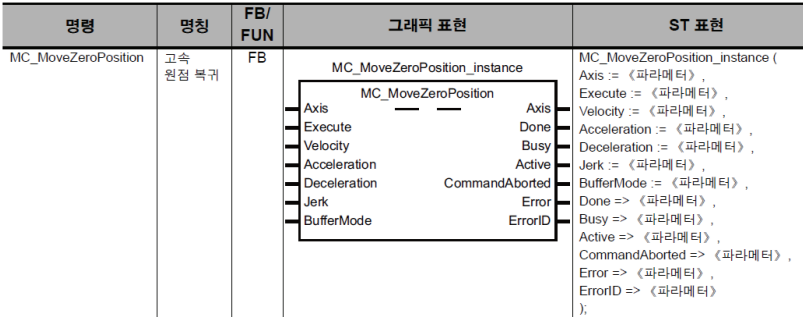
고속원점복귀
원점확정 상태에서 원점위치로 위치결정을 하는 기능입니다. 절대 좌표의 '0'을 목표 위치로 위치 결정을 실행하고,
원점으로 복귀합니다. MC_MoveZeroPosition(고속원점복귀)명령을 사용하여 목표 속도, 가속도, 감속도, 저크를
지정할 수 있습니다. 원점 미확정 상태에서 실행하면 명령 이상이 발생합니다.
https://hyry0819.tistory.com/265
'Study' 카테고리의 다른 글
| 골프 레슨의 시작, SDR Golf 배우기 #1 골프 레슨 기록하기. (0) | 2023.08.09 |
|---|---|
| Omron PLC 위치결정 버퍼메모리 (0) | 2023.06.28 |
| Omron PLC 저크 Jerk, 옴론 저크, Omron Jerk, 저크 뜻?, 저크 란?, (0) | 2023.06.28 |
| Omron Servo Motor 조그운전 Jog + Jog- (0) | 2023.06.28 |
| Omron Servo Motor Servo On FB 서보온 펑션블록 (0) | 2023.06.28 |










![[PXG 카네 정품] 배틀레디2 DARKNESS 다크니스 머스탱 퍼터, 33인치.Steel, PLUMBER.PISTOL](https://img1c.coupangcdn.com/image/affiliate/banner/ecf44309a8cd5a7b361e0ebfd245dd99@2x.jpg)
![[PXG 카네 정품] 배틀레디2 DARKNESS 다크니스 클로저 퍼터, 33인치.M16, PLUMBER.PISTOL](https://image10.coupangcdn.com/image/affiliate/banner/bdabd17356d44f1a4fbf06e11853ccd9@2x.jpg)
![[PXG 카네 정품] BATTLE READY2 BATATTACK 배틀레디2 배트어택 퍼터, 35인치.STEEL, PLUMBER.PISTOL GT 1.0](https://img3c.coupangcdn.com/image/affiliate/banner/3d68f2840c37edfe4a968458fc6ffcd2@2x.jpg)



![[삼양인터내셔날정품] 핑 G440 MAX 드라이버 2025년, 10.5도, S](https://img3a.coupangcdn.com/image/affiliate/banner/8afd142829f60629afefcb0280123133@2x.jpg)





댓글